自动驾驶|华为公开自动驾驶相关专利,揭示车道级路径规划技术原理

文章图片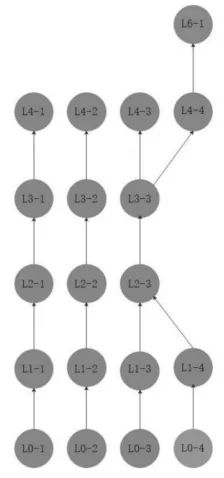
文章图片
在我们的日常驾驶中 , 地图导航必不可少 , 对于自动驾驶而言 , 能进行车道级导航的高精度地图更为重要 。
透过专利看技术——每周
为你解读一家国内外巨头企业
最新专利情报
本次解读专利:CN202110971534.9
专利权人:华为
技术标签:#智能车 #自动驾驶方法 #高精导航
目前我们用到的导航产品 , 一般仅能在最近路口信息进行车道导航 , 满足车辆在过路口时的换道需求 。 或者 , 仅提供一条能处理直行、转弯、掉头、路口等交通场景的全局引导线 , 但该路线中换道位置等都是固定的 , 不能提供完备的路径选择空间 。
对于自动驾驶而言 , 这是远远不够的 。
在复杂城市道路场景中 , 车道级路径规划及导航引导直接影响自动驾驶系统的智能性、安全性和舒适性 。
日常我们驾驶中使用的导航 , 仅需提供粗略的语义级导航建议即可 , 接收到相应的操作指导后 , 我们再自行判断操作 。 而自动驾驶系统必须依靠明确的、精准的、连续变化的导航信息才能完成自动驾驶任务 。
在本专利中 , 华为公开了一种车辆实时自动换道的相关技术 , 揭示了其无人驾驶自动换道技术的模型构建方法、评价算法 。
【自动驾驶|华为公开自动驾驶相关专利,揭示车道级路径规划技术原理】据前沿君了解 , 其基本思路如下:
1、构建车道路径网络拓扑
为了向计算机准确描述现实的道路情况 , 相关算法首先是构建起始点到目标位置之间的可能路径的网络拓扑图 。
这一步的相关路径通常是基于标准精度或高精度地图构建的路网模型 , 结合自动驾驶任务的给定出发点和目的点 , 按照性能指标(时间最短、距离最短、红绿灯路口最少、智能驾驶区域范围最大等)规划出能从出发点到达目的点、由一系列前后拓扑相连的道路段构成的一条最优路径 。
我们看到的道路 , 和车道眼中的道路
在车道路径属性中 , 除了顺序 , 还能表征各车道段本身的属性信息 , 如当前车道是否可向左/右换道、当前位置虚线可换道剩余长度、当前位置到路口/终点的距离等 , 从而提供更丰富更精确的车道级导航引导 。
2、构建算法 , 量化评价路径优劣
构建拓扑路径后 , 基于车道拓扑关系以及车道场景分别为每条路径构建评价函数 , 该评价函数包括横向评价函数、纵向评价函数 。
纵向评价函数 , 用于纵向全局引导 , 具体用于对所述K条路径中的任一路径中任一位置的影响车辆纵向决策结果的因素进行评价 。 它表征换道需求的紧急性 , 用于决策当前时刻是跟车或者换道、是立刻换道或者下一时刻换道、是紧急换道或者平缓换道等驾驶行为的执行时机与紧急性 。
横向评价函数 , 用于横向全局引导生成 , 具体用于对所述K条路径中的任一路径中任一位置的影响车辆横向决策结果的因素进行评价 。 它表征全局的横向行为趋势信息 , 尤其是为完成从当前位置到目的点的导航任务的未来运动趋势 , 用于决策当前时刻是否需要换道、是向左换道还是向右换道收益更大等驾驶行为的运动方向与目标车道 。
然后 , 在实时导航过程中 , 根据车辆当前位置进行实时车道匹配 , 获取车辆的当前所在车道和可选的备选车道 , 并获取当前车道和所有备选车道的横向评价值和/或纵向评价值 。
- 华为|别不信!魅族如今处境,雷军早有预料,小米也早已体验
- 华为|问界M5风光无限,赛力斯SF5暗自神伤,华为或许低估了造车这事?
- 华为鸿蒙系统|华为偷偷上架新机,鸿蒙系统+5000mAh大电池,仅售1399元
- 5G|关于5G,华为赢了
- 华为|华为任正非最新信件曝光:春天很快就会到来!
- 5G|华为利用5G毫米波发现园区入侵者,这让美国5G联盟情何以堪
- ios|华为迎来新里程碑,在新领域旗开得胜!
- 打脸!华为在美国,用专利把英特尔、苹果、微软、高通打败了
- 华为|iOS15.2.1 正式版发布:新增 6 项改进
- 鸿蒙os|麒麟9000再度发力,华为高精度导航让你出行不迷糊